


力传感与重力补偿
高分辨率力矩传感与驱动,是双向力反馈的硬件基础;全程重力补偿,悬停无漂移,长时操作不疲劳。



机器人会动很多年了,能把活干成的没几个。差距不在电机,在模型——而模型的上限,卡在数据。
预训练数据网上有的是;让机器人真正干活的后训练数据,只能在真机上一条条采。这正是主从遥操作在做的事,也是我们做 OmniLink 的原因。
仿真数据落不了地,数据得从真实机器人上来。
接触力只在采集当下产生,事后补不了。
错了当场纠,纠错本身就是最有价值的数据。
Pro 打高端标杆,Lite 铺规模数据——同一套数采软件,双线通用。
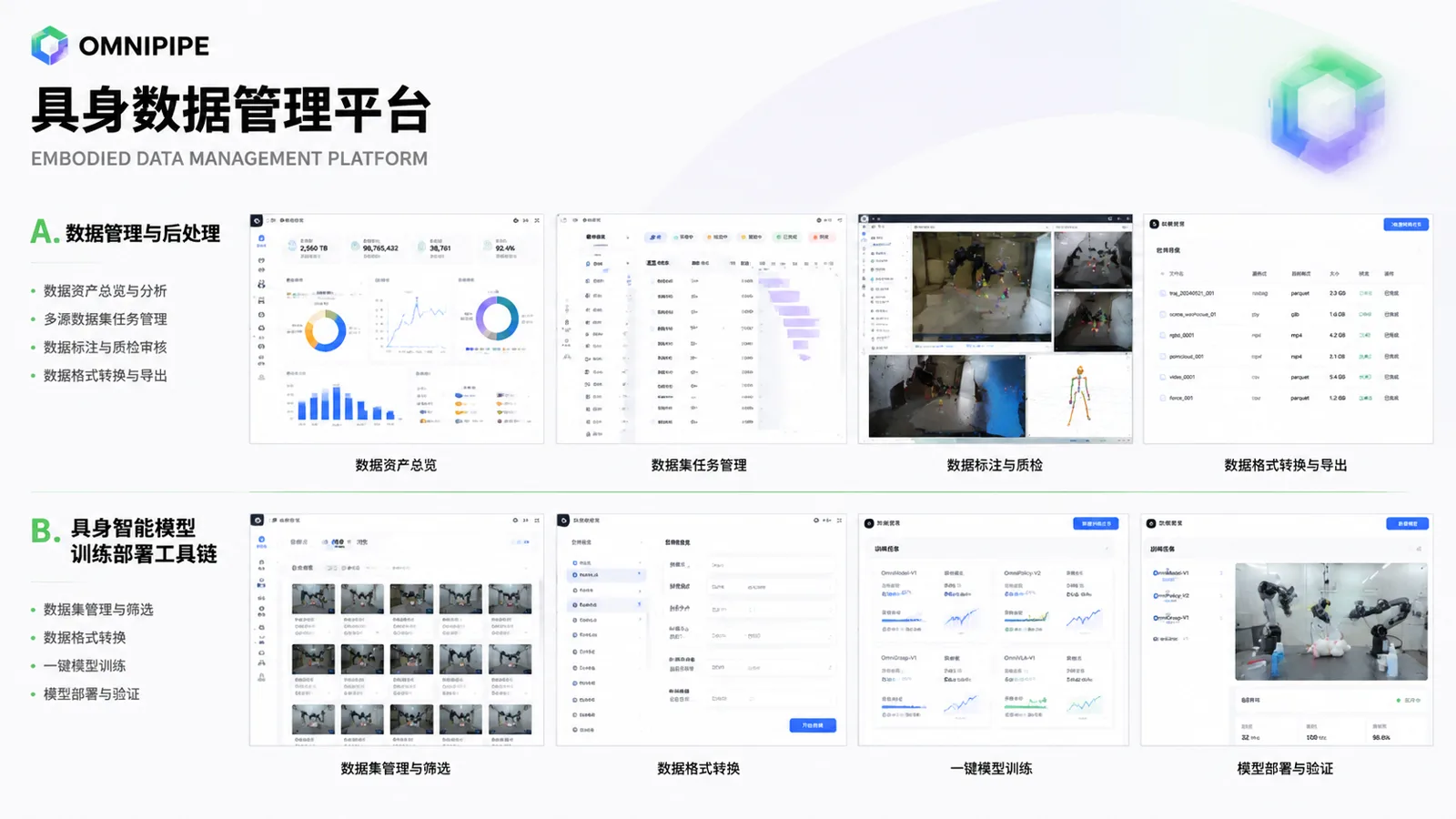
设备把数据采进来,OmniPipe 把数据变成模型。界面上只做四件事,数据全程不出平台。
主从示教,动作 + 力全要素落库,采集即标注即质检。
采完即训,模型在平台内直接微调,数据不出域。
自研仿真验证,上真机前先过仿真关。
部署作业中每次人工接管自动回采,闭环再转一圈。
主控、伺服、编码器、力传感——遥操作的四大刚需件全部自研,大湾区制造。手感这件事,外购件给不了。
高分辨率力矩传感与驱动,是双向力反馈的硬件基础;全程重力补偿,悬停无漂移,长时操作不疲劳。

仿人手腕的关节布局,动作直觉自然。示教时不别扭、不代偿,力与动作采得准。

磁编码关节模块总线串联,全臂同步采样、布线简洁;国产主控芯片,核心电子自主可控。

置信度自估、平滑接管、介入即采集。模型没把握时人接手不打断作业,每次接管都是训练数据。
设备、软件与驻场服务一起交付:采数据、教产线、替人进危险现场。

面向本体厂与数据团队。整机批量数采,动作 + 力全要素落库,直通训练——50 条示教即可生成新技能。

小批量多品种的产线,换线靠示教,不靠重新编程。置信度自估、人随时接管,产线不停线。

海洋、核电、油气等高风险场景。人在安全区完成精细力控作业;每一次作业,本身就是高质量数据积累。
交付沉淀为场景资产——同类场景二次交付,少量示教即可适配上线,实施周期大幅缩短。
珠海灵巧操作挑战赛
央视新闻 · 央视财经 · 凤凰卫视等
ICRA · IROS · ROBIO 等国际会议
机器人领域多项授权
全为具身科技做力反馈遥操作与具身智能数据采集系统。核心团队来自华为与香港大学、香港理工大学、大湾区大学,两位 IEEE T-RO 副主编担任学术顾问——香港链接人才与科研,大湾区负责量产交付。
我们不做 PPT 产品。主控、伺服、编码器、力传感四大刚需件自研,结构设计、精密加工、整机装配到出厂测试都在大湾区自己的产线上完成——迭代快,交付稳。


采数据、远程作业还是搭科研平台?发封邮件说明需求,我们安排演示。